My research team embarked on a groundbreaking mission: to design and construct a robotic fish. Fueled by a research project supported by the esteemed US Navy, our objective was to revolutionize the efficiency of underwater vehicles by emulating the graceful movements of aquatic life. Collaborating with the visionary minds in the Electrical Engineering department, who were pioneering the development of MEMS sensors capable of detecting subtle water pressure changes, we forged a partnership to create an advanced platform that would sense and respond to its underwater environment.

Unleashing the Power of Biomimicry: Drawing inspiration from the elegance and efficiency of fish locomotion, our project aimed to unlock the secrets of nature’s design and apply them to the realm of underwater technology. By leveraging the principles of biomimicry, we endeavored to develop a robotic fish that could navigate the depths with enhanced agility, reduced energy consumption, and improved maneuverability. Especially in schooled formation, this type of swimming yields great increases in efficiency
Collaborative Synergy: Recognizing the multifaceted nature of this ambitious undertaking, our mechanical engineering team joined forces with the brilliant minds from the Electrical Engineering department. Their pioneering research in Micro-Electro-Mechanical Systems (MEMS) sensors, capable of precisely detecting water pressure changes, served as the foundation for our robotic fish’s sensory perception. By seamlessly integrating their cutting-edge advancements with our mechanical expertise, we created a platform that could adapt and respond to the intricate nuances of its underwater habitat.
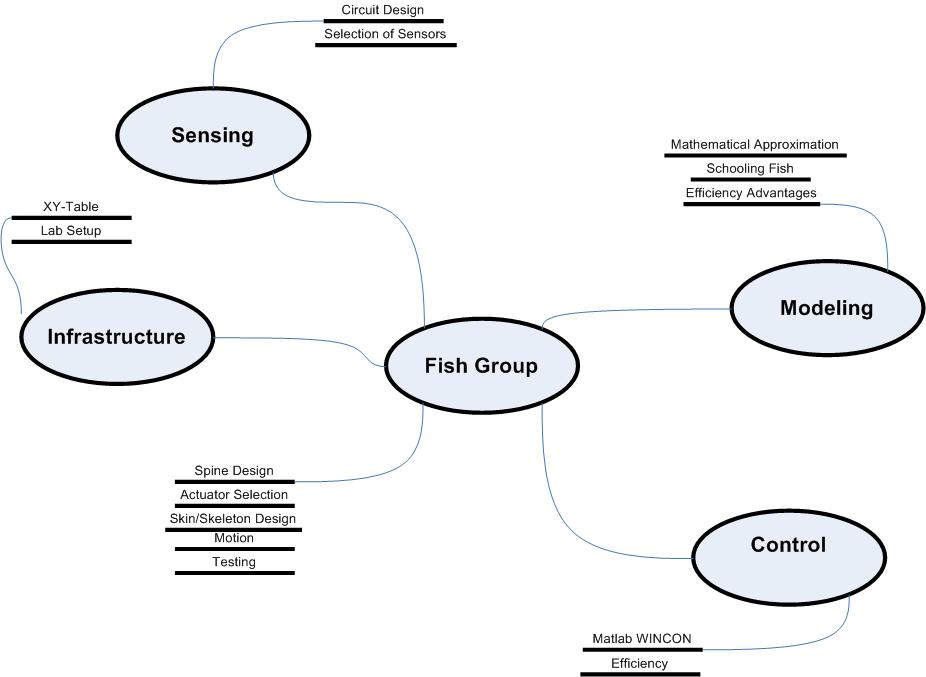
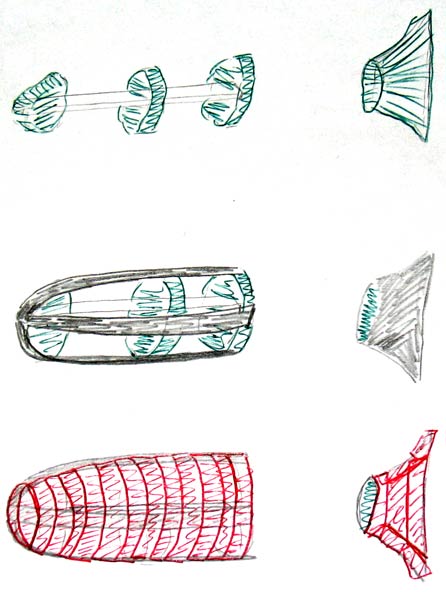
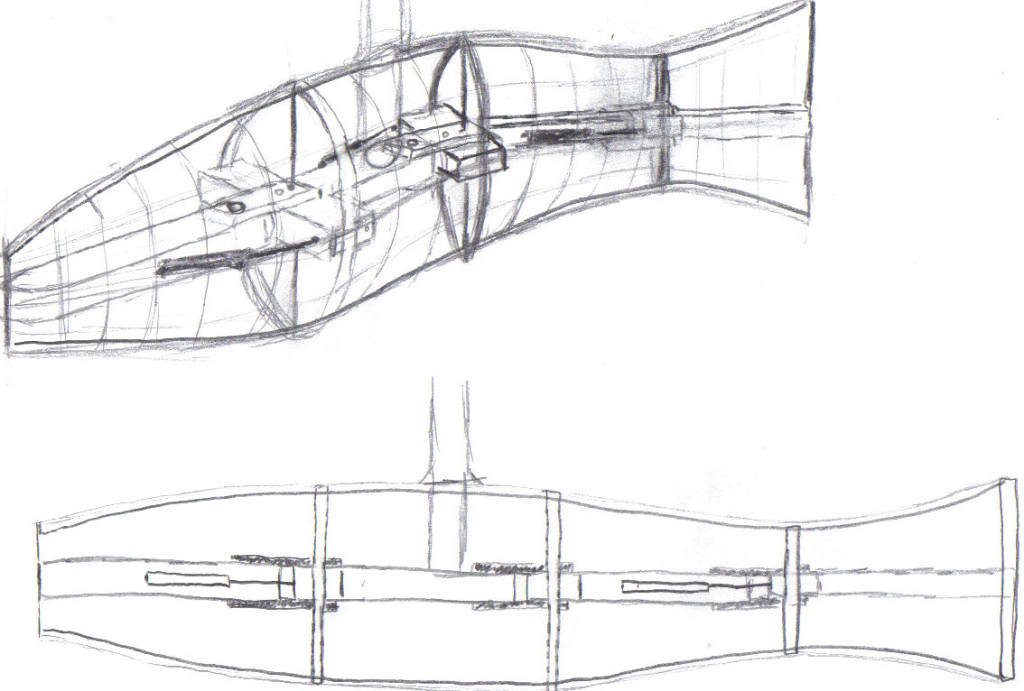
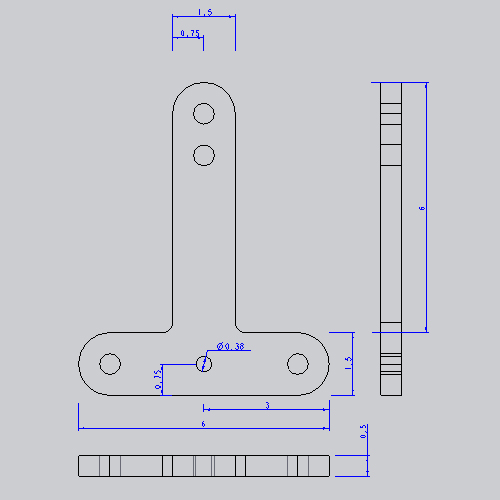
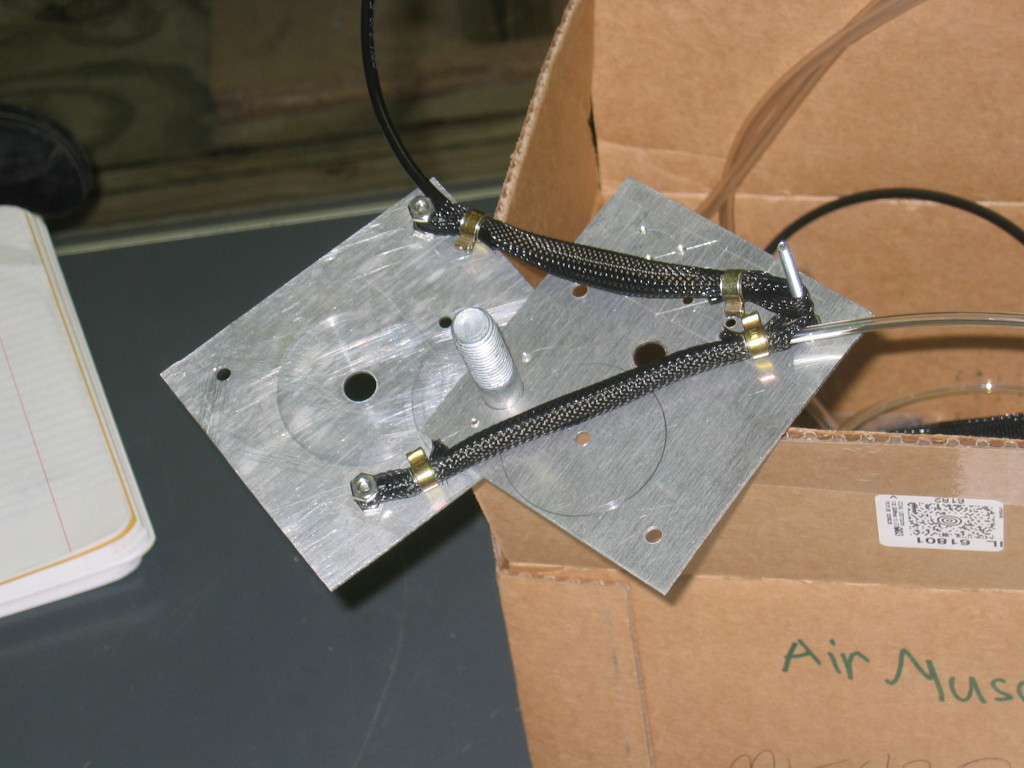
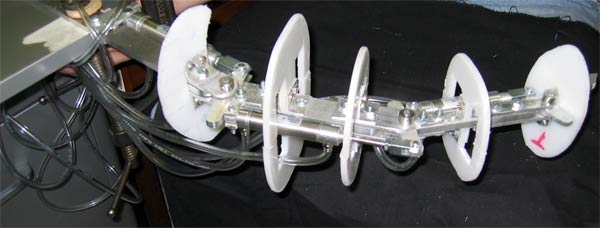
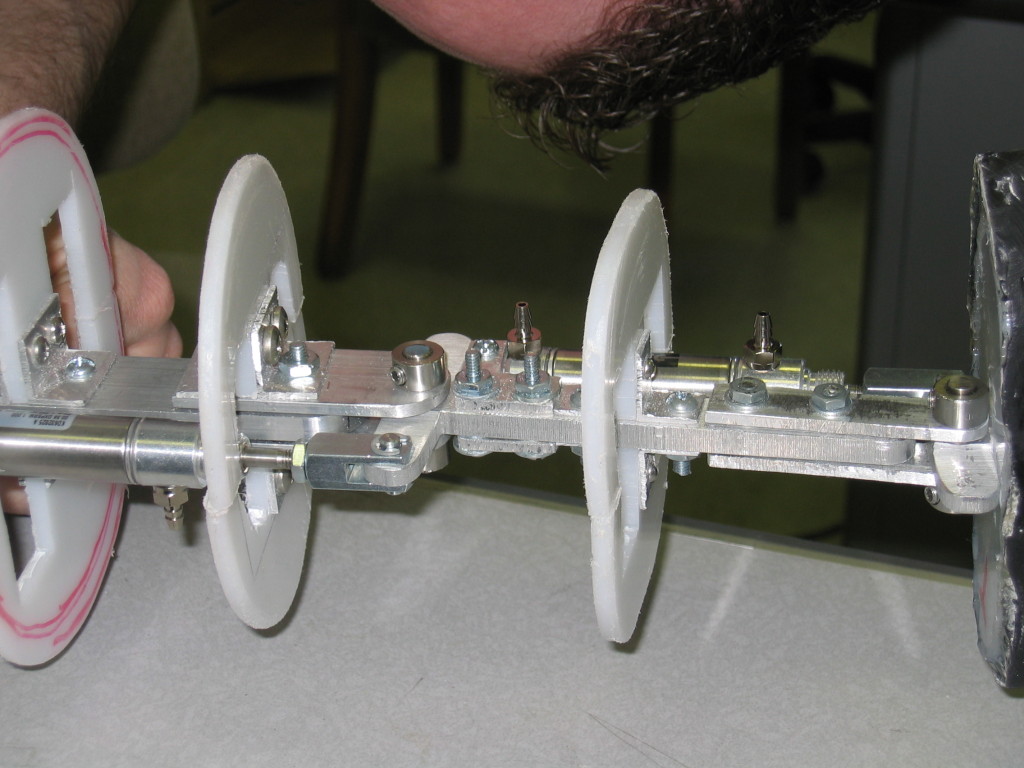
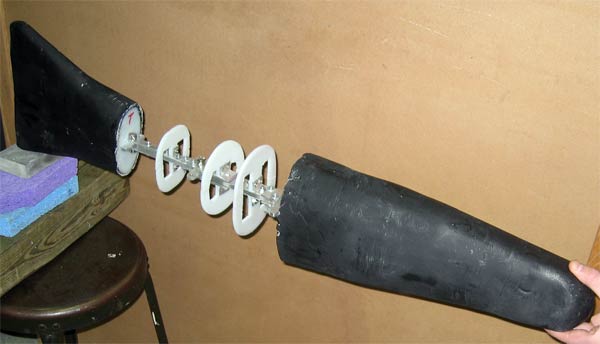
Designing the Aquatic Innovator: Meticulously blending art and science, our design process revolved around crafting a robotic fish that mirrored the anatomical characteristics and swimming patterns of its aquatic counterparts. With unwavering attention to detail, we meticulously engineered the fish’s body shape, fin design, and propulsion mechanism to maximize hydrodynamic efficiency. Leveraging state-of-the-art computer-aided design (CAD) software, we optimized the fish’s geometry, ensuring fluid motion and minimized drag.
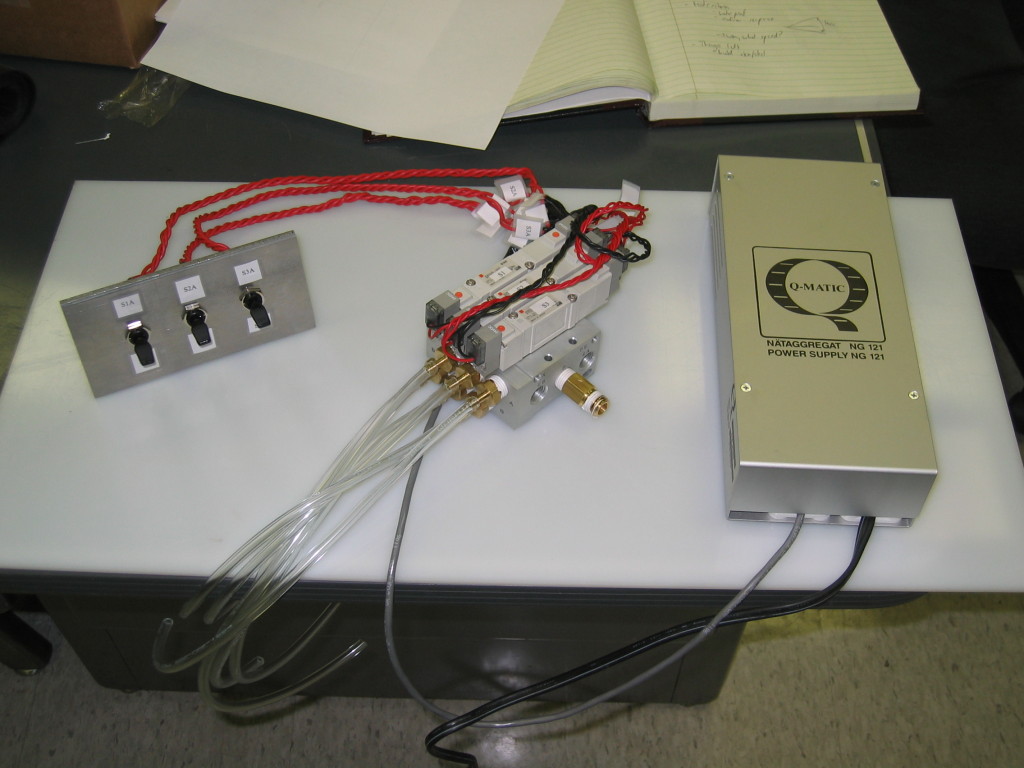
Sensing the Subaquatic Realm: To bestow our robotic fish with environmental awareness, we integrated the MEMS sensors developed by our Electrical Engineering partners. These sensors served as the fish’s “digital senses,” allowing it to detect subtle variations in water pressure and adapt its swimming behavior accordingly. By fusing mechanical and electrical expertise, we enabled our creation to navigate complex underwater terrains, respond to obstacles, and autonomously adjust its swimming parameters in real-time.

A Glimpse into the Future: Our research design project exemplifies the remarkable synergy of disciplines and the transformative power of collaborative research. Through the union of mechanical and electrical engineering, we brought forth an innovative robotic fish capable of paving the way for enhanced underwater vehicle efficiency. Our creation stands as a testament to the boundless possibilities that arise when diverse fields converge to address real-world challenges.
Conclusion: As we conclude our journey into the depths of our senior design project, we reflect upon the remarkable strides made in the realm of underwater technology. By merging the realms of mechanical and electrical engineering, we have propelled the evolution of underwater vehicles, drawing inspiration from nature’s exquisite designs. Our robotic fish stands as a testament to the endless potential of interdisciplinary collaboration and serves as a beacon of innovation, guiding us towards a future where underwater efficiency is redefined by the marvels of biomimicry.


My role: part design, assembly, and project manager
Worked with: Jason Vlachos, Alan Urban, and Frank Ursetta
Faculty Advisor: Scott David Kelly